Maya動畫教程
maya的反轉腳鎖定
maya的反轉腳鎖定
反轉腳設定其實是一個骨骼設計的設定,以腳來驅動角色,我們管它叫做反轉腳,因為它是建立在腳跟、角尖至腳踝部分的一套系統。這樣設置的優(yōu)勢是:你可以利用一套外部物體來靈活的控制像奔跑,疾走這樣的動作,和將其鎖定于地面。
Bones
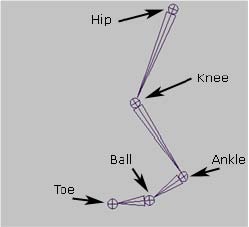
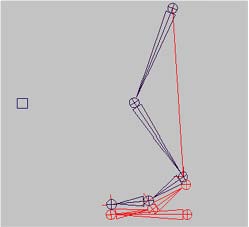
開始于腿部的骨骼建立。
最常用的設置順序如下:臀部---膝部---腳踝部---腳中部---腳尖部
(Hip--Knee--Ankle--Ball--Toe)
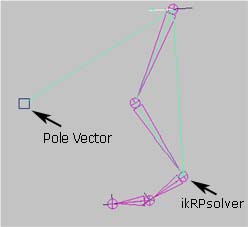
IK RP Solver
在膝蓋前添加一個Null或是Cube,這個物體將要做一個Pole Vector,以來控制腿部的方向。
臀部(hip)和腳踝(ankle)創(chuàng)建一個ik手炳(IK RP Solver)
叫做ikHandle_Ankle,然后再把剛才創(chuàng)建的Cube和ik手柄做一個Pole Vector連接。
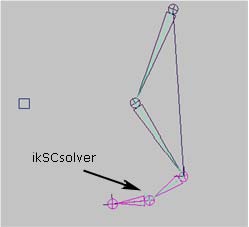
IK SC Solver 1
從腳踝(ankle)到腳中部(ball)創(chuàng)建一個IK SC Solver。
叫做ikHandle_Ball
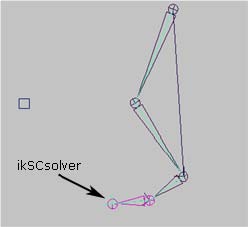
IK SC Solver 2
從腳中部到腳尖部創(chuàng)建一個IK SC Solver
叫做:ikHandle_Toe
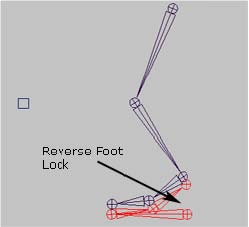
Reverse Foot Lock
從腳跟(heel)到腳尖(toe)至腳中部(ball)最后是腳踝部(ankle)的順序創(chuàng)建一個反轉腳.反轉腳沒有必要和腳尖部分重合,你可以把它設置的低一些,以便你開起來更清晰明了。
反轉腳名稱:->RF_Toe->RF_Ball->RF_Ankle
Reverse Foot Lock
反轉腳腳踝(ankle)關節(jié)與ikHandle_Ankle作父子約束。
反轉腳腳中(BALL)關節(jié)與ikHandle_Ball作父子約束。
反轉腳腳尖(toe)與kHandle_Toe作父子約束。
至此反轉腳的設置已經完畢,你可以應用它來控制腳部和腿部的運動了